天津助力机械手实现力矩限制的方法主要依赖于内置的传感器和控制系统,通过实时监测和调整来确保机械手不会施加超过设定值的力矩。以下是几种常见的力矩限制实现方式:
天津硬臂式助力机械手,作为工业自动化领域的重要设备之一,以其独特的结构和良好的性能在物料搬运、生产线装配等多个领域展现出了显著的优势。以下是对硬臂式助力机械手优势的详细阐述:
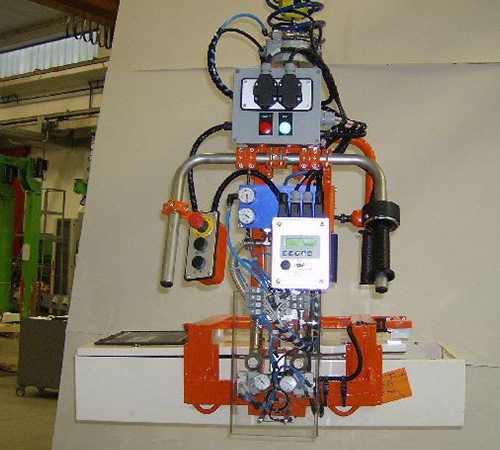
天津了解下助力机械手的应用